Arash Kalantari
I have over 10 years of industry experience as a Robotics Mechanical Engineer. After earning my PhD, I joined DAQRI, where I helped design the world’s first wearable human-machine interface, the DAQRI Smart Helmet. In 2017, I joined NASA JPL and have been involved in some exciting projects, including the Mars Sample Recovery Helicopter and the Mars Rover 2020. I’ve also been the principal investigator of research projects like developing perching systems for Mars and leading hardware efforts in the DARPA Subterranean Challenge. Along the way, I’ve filed patents and shared my work at conferences, constantly learning and growing.
Download My ResumeExperience
Robotics Mechanical Engineer
- Extreme Environment Robotics Group Lead
- Mars Sample Return Mission
- Mars Sample Recovery Helicopter (Manipulation Lead System Engineer)
- Sample Transfer Arm End Effector (Mechanical Engineer)
- Mars Rover 2020 (Mechanical Engineer)
- Flight qualification of robotic arm force torque sensors
- DARPA Subterranean Challenge (Hardware Lead)
- Ultra-light weight perching system for sloped or vertical surfaces on Mars (Principal Investigator)
- Deployable self-anchoring sensor payload for future Mars helicopter (Principal Investigator)
- Robotic inspection of distillation columns (Task Manager)
- Asteroid redirect mission (Mechanical Engineer)
Mechanical Design Engineer
- Designed mechanical hardware of DAQRI Smart Helmet, the world’s first wearable human machine interface (complete product development cycle system experience).
- Mechanical design of camera and optical subsystems.
- Thermal management system design, FEA, and experimental validation.
- DFM, DFA, and tolerance stack up analysis of system components.
- Collaborating with EE team to design and integrate electronics.
- Design of assembly, test, and calibration fixtures.
Research Assistant
- Designed, prototyped, and assessed the performance of a hybrid terrestrial and aerial robot.
- Programmed autonomous flight of a quadcopter using Microsoft Kinect and OpenCV.
- Designed and prototyped a novel walking and flying robot.
Research Assistant
- Operated atomic force microscope (AFM) for Nano-Imaging, Nano-manipulation, and Nano-fabrication.
- Planned algorithms and programmed scripts for automated AFM-based Nanomanipulation using C++ and OpenCV.
Mechanical Engineer
- Collaborated in design, development, and manufacturing of Robotuft, a carpet tufting machine.
- Designed the machine components and modeled the system in SolidWorks.
- Performed strength and modal analysis of the system using Ansys.
- Fabricated, tested, and debugged the machine.
Robotics Mechanical Engineer
- Designed and fabricated several mobile robots for operation on rough terrain.
- Implemented robot localization and mapping algorithms for missions on uneven terrain.
- Planned and programmed autonomous stair climbing algorithm for ResQuake robot.
Education
Illinois Institute of Technology | Chicago, IL
K. N. Toosi University of Technology | Tehran, IRAN
K. N. Toosi University of Technology | Tehran, IRAN
Skills
- C++
- Matlab
- OpenCV
- ROS
- Solidworks (EPDM, Simulation, Circuitworks)
- Inventor
- AutoCad
- GD&T
- MSC Patran
- MSC ADAMS
- Ansys
- NC & CNC machining
- Lathe Machining
- Laser cutting
Awards & Certifications
- JPL team award for delivering Mars 2020 flight robotic arm, Sep 2019
- 1st place at DARPA Subterranean Challenge Urban Circuit, Elma, WA, Feb 2020
- 2nd place at DARPA Subterranean Challenge Tunnel Circuit, Pittsburgh, PA, Aug 2019
- JPL award for outstanding technology development in underground exploration robotics, Aug 2019
- IIT Sigma Xi Research Award for Outstanding Graduate Student, April 2014, Chicago, IL
- 2nd place, Best Research Poster Award at IIT, April 2010
- 3rd place, Rescue Real League of RoboCup 2008, Suzhou, China
- Best Operator Interface Award, Rescue Real League of RoboCup 2006, Bremen, Germany
- 2nd Place, Best Mechanical Design Award, Rescue Real League of RoboCup 2005, Osaka, Japan
Projects
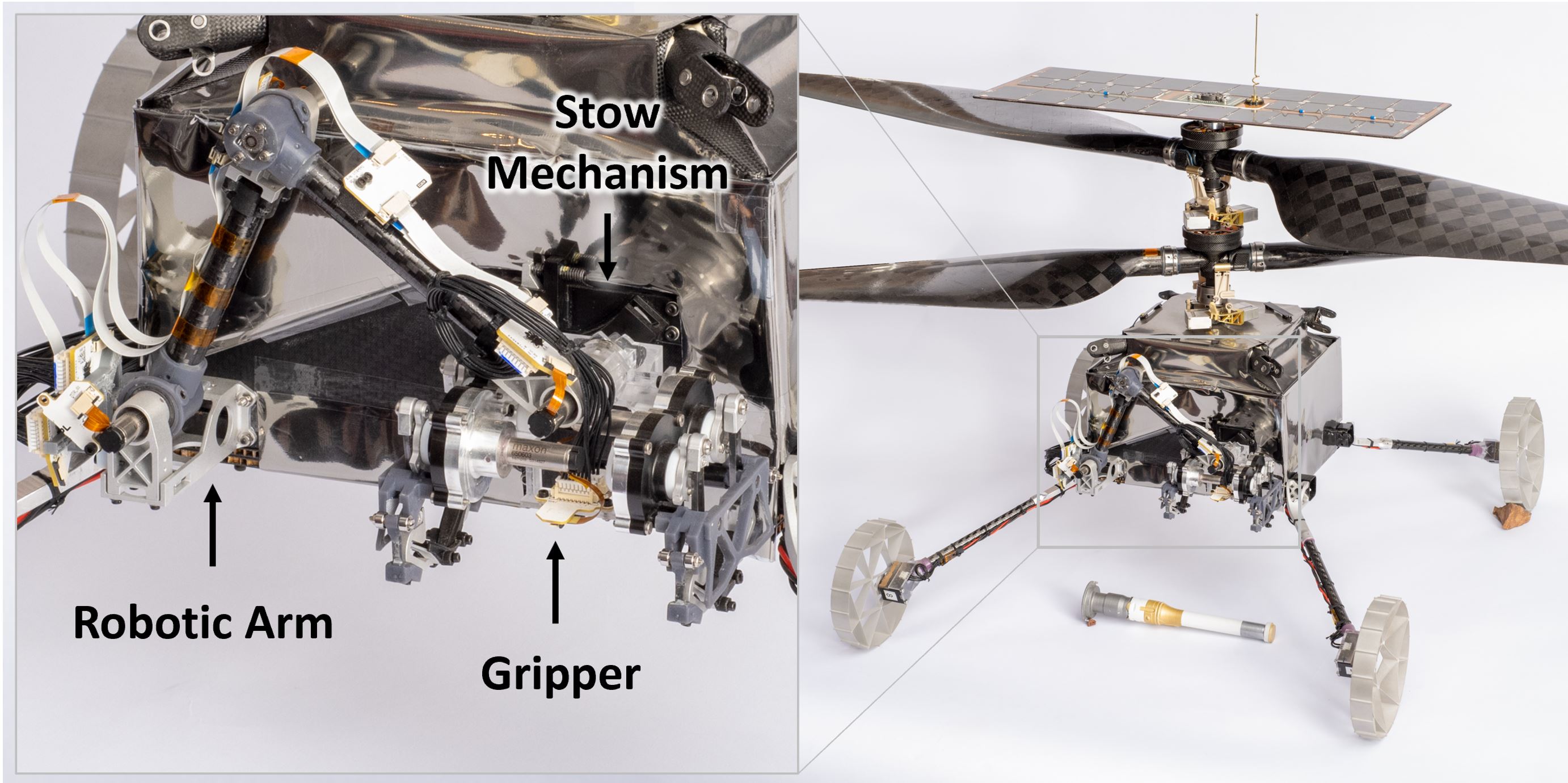
Mars Sample Recovery Helicopter
As the Manipulation Lead System Engineer, I led the development of the Mars Sample Recovery Helicopter, focusing on its manipulation systems to ensure successful sample retrieval on Mars.
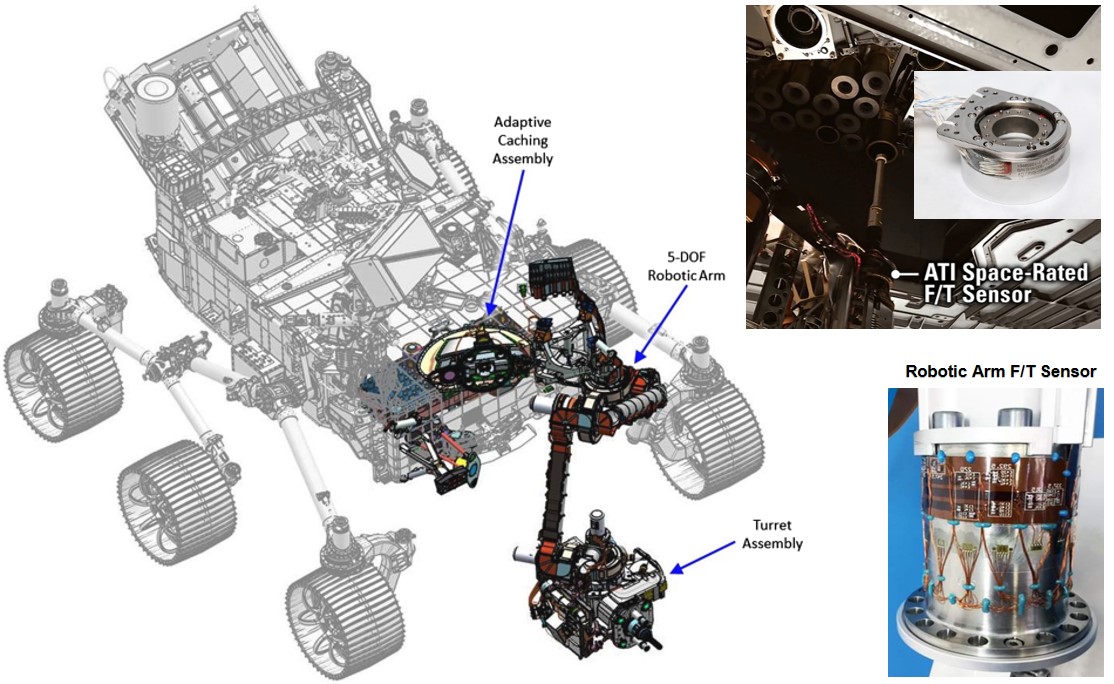
Mars Rover 2020
Contributed as a Mechanical Engineer to the Mars Rover 2020 project, focusing on the flight qualification of robotic arm force torque sensors.
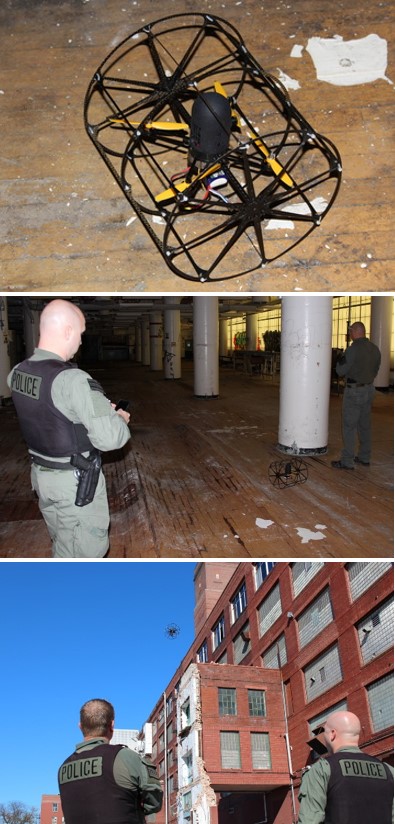
DARPA Subterranean Challenge
Served as Hardware Lead for the DARPA Subterranean Challenge, focusing on developing and integrating hardware systems for subterranean exploration robotics.

DAQRI Smart Helmet
Designed mechanical hardware for the DAQRI Smart Helmet, including camera and optical subsystems, and worked on thermal management systems.


Hybrid Terrestrial and Aerial Robot
Designed, prototyped, and assessed the performance of a hybrid terrestrial and aerial robot, including programming autonomous flight using Microsoft Kinect and OpenCV.


Custom Inexpensive 4DOF and 6DOF Robotic Arms

